Bike Safety Indicators
Bicycling is a good way of getting exercise and reducing the carbon footprint. Nowadays, people are increasingly bicycling to commute, especially after sharing-bikes have become popular, allowing commuters not to be in crowded public transportation.
However, bicyclists will encounter some safety hazards, especially novice riding. Therefore, we designed safety indicators on the bike to assist bicyclists to have safer journeys. The prototype includes two parts: providing directional indicators at the rear when riders are about to turn and indicating distance and prompt to riders when objects are approaching.
Group Project | 2020.10-12
#Hardware #Interaction #Prototyping #User Testing
The Walkthrough Video
Problem Statement
Riding bikes on urban roads face a host of hazards. They often must share the road with vehicles and be cautious about close objects, and injuries can happen even on a designated path. Riding at night has a higher risk because, on the one hand, it is difficult to see close objects; on the other hand, sometimes it is difficult for a motor vehicle to spot the rider.
According to the United States Department of Transportation's bicycle safe riding recommendations, being 'focused and alert' is one of the essential rules for bicyclists to ensure safety. Riders are suggested to anticipate what others may do before they do it. Moreover, the other way to avoid a crash is to ride predictably, which helps motorists get a sense of what riders intend to do and react. Similarly, traffic laws require cyclists to make hand signals when changing directions and turning in many cities.
Resolution and Value
Considering the above riding safety issues and precautions that can help riders avoid the risk of accidents, we ideated assistive safety indicators for bicyclists, including two parts: providing directional indicators at the rear when riders are about to turn and indicating distance and prompt to riders when objects are approaching.
Our design value and vision can be summarized into 1 ) Help bicyclists ride more safely; 2 ) Help junior bicyclists keep a sense of security by using the assistive tools; 3 ) Remind the vehicles or pedestrians behind when the bike is about to turn.
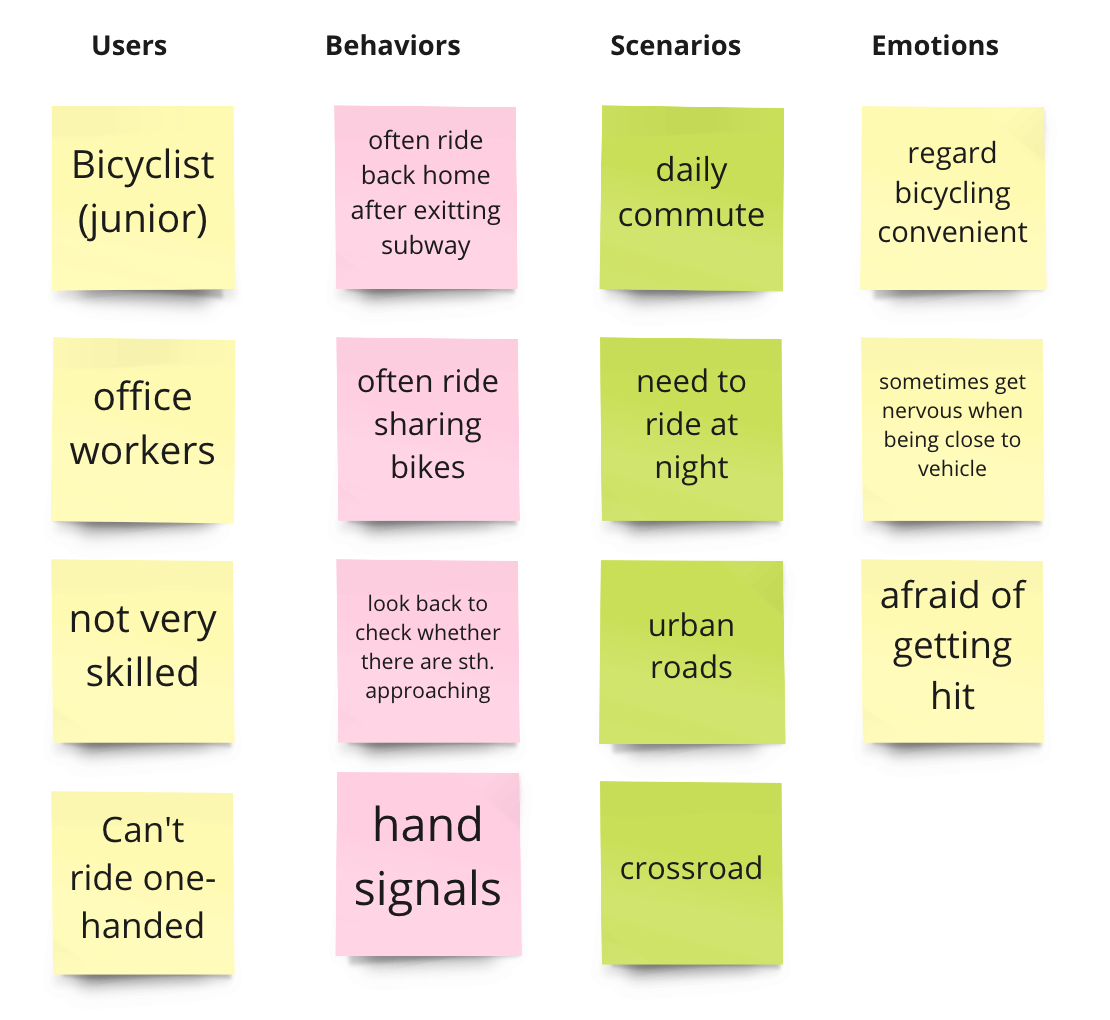
Target User Characteristics
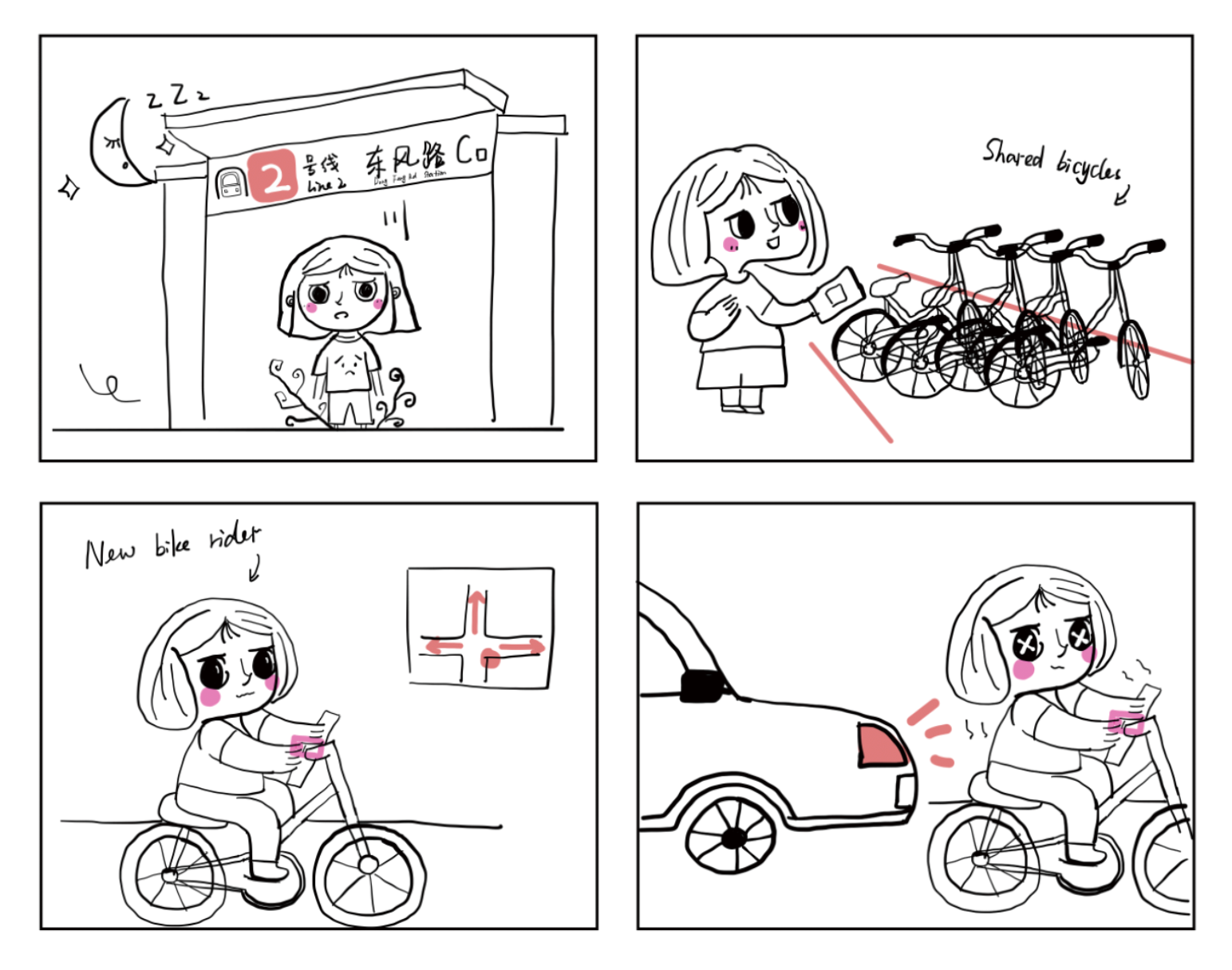
Storyboard
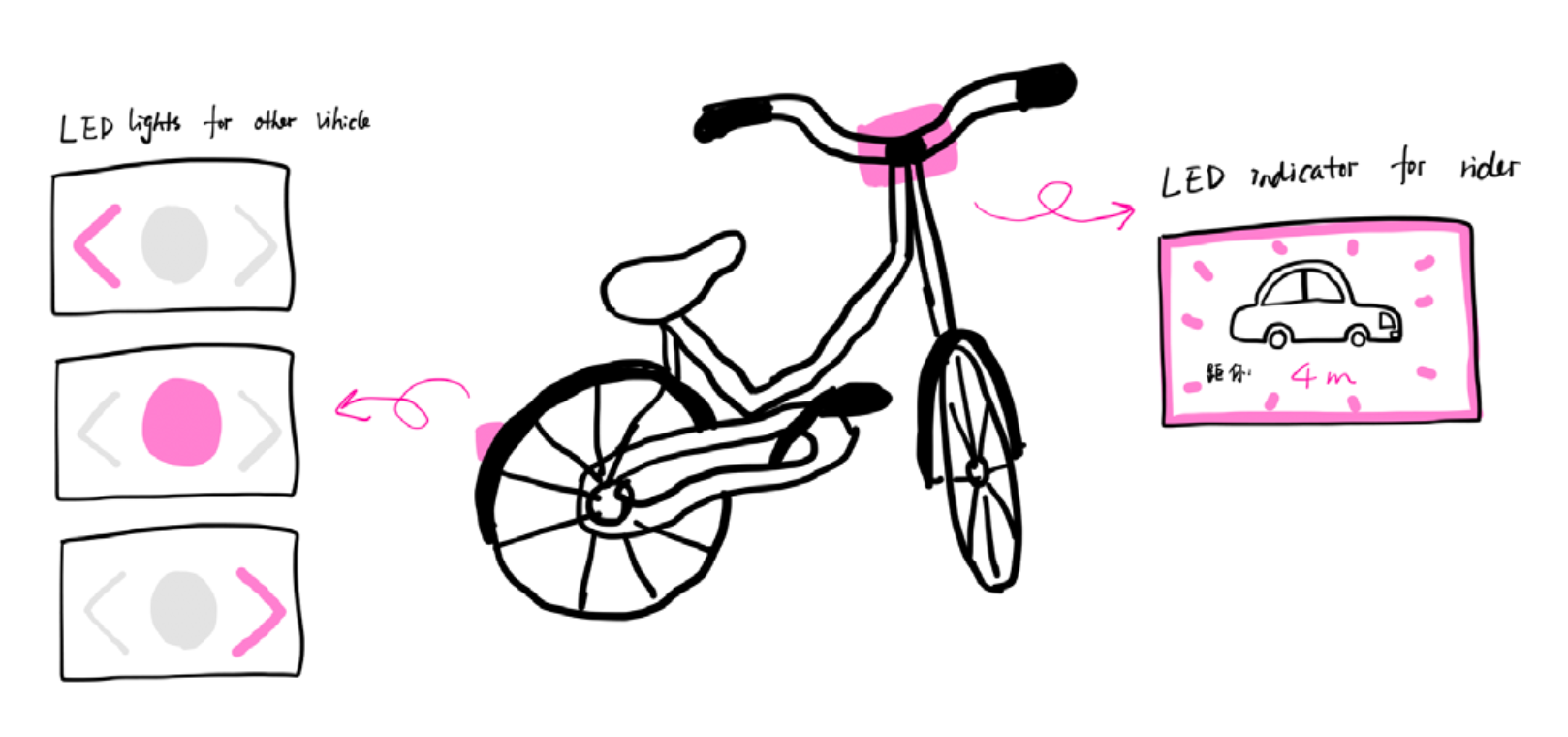
Idea Sketch
Prototyping
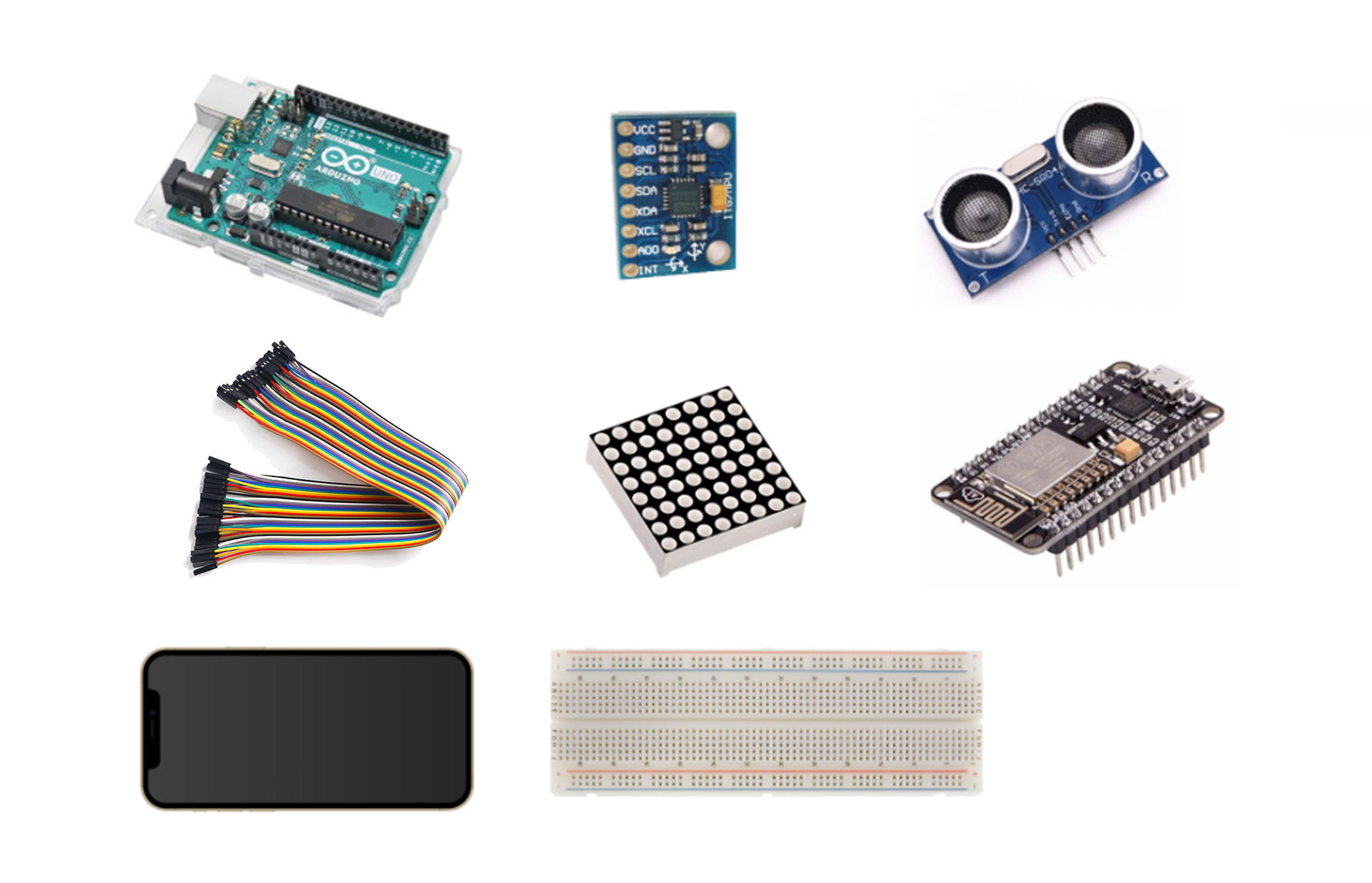
Components
We have made four prototypes during the project, from testing the working conditions of sensors, integrating features and components, and installing them on the bicycle, finally adding interface output.
We used two sensors, MPU6050 (3-axis gyroscope and accelerometer) and Ultrasonic HC-SR04. Moreover, we have two data from users and the real world, namely the horizontal rotation angle and distance.
The MPU6050 sensor was used to detect the bike handlebar's rotation angle, thus defining whether the user is about to turn and the turning direction displayed on the LED matrix. In the later stage of the project, we adopted ESP8266, shiftr.io, and Noodl to achieve distance reminder screen output, which will be explained in the next sections.
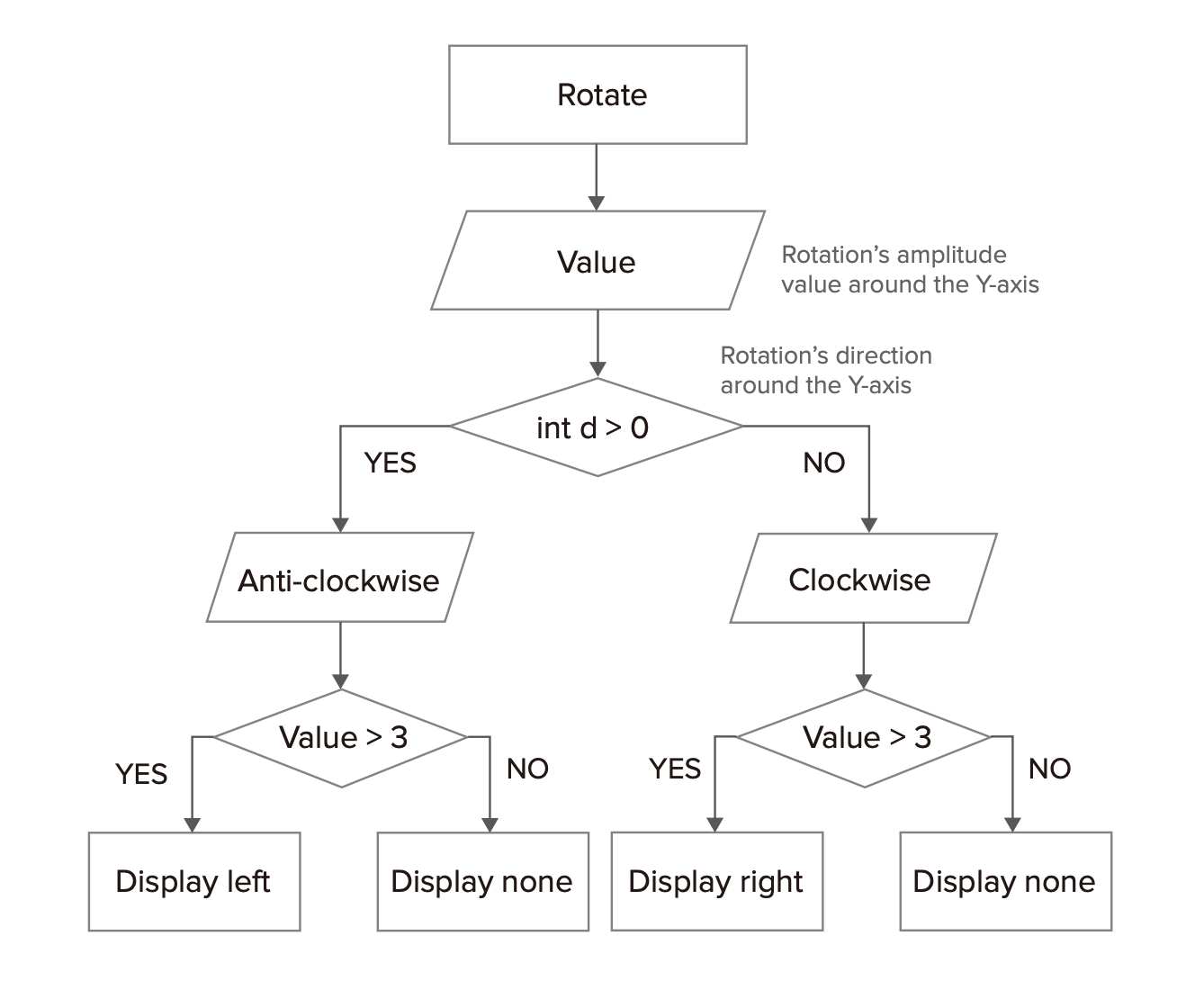
The data flow of angle detection and directional display
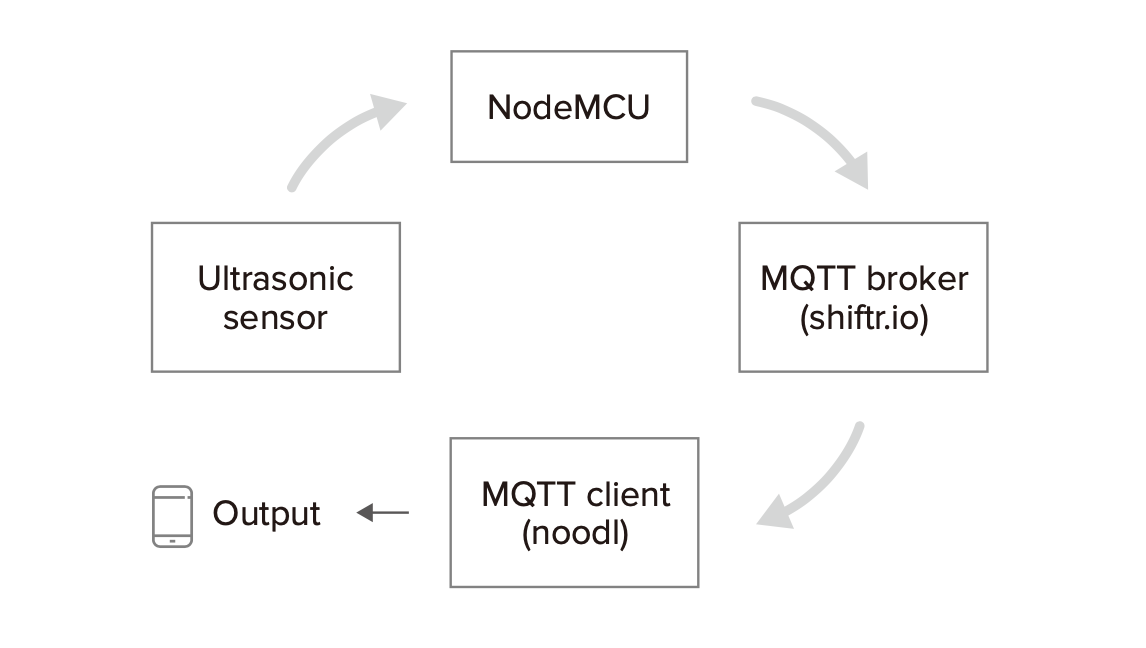
The data flow of distance detection
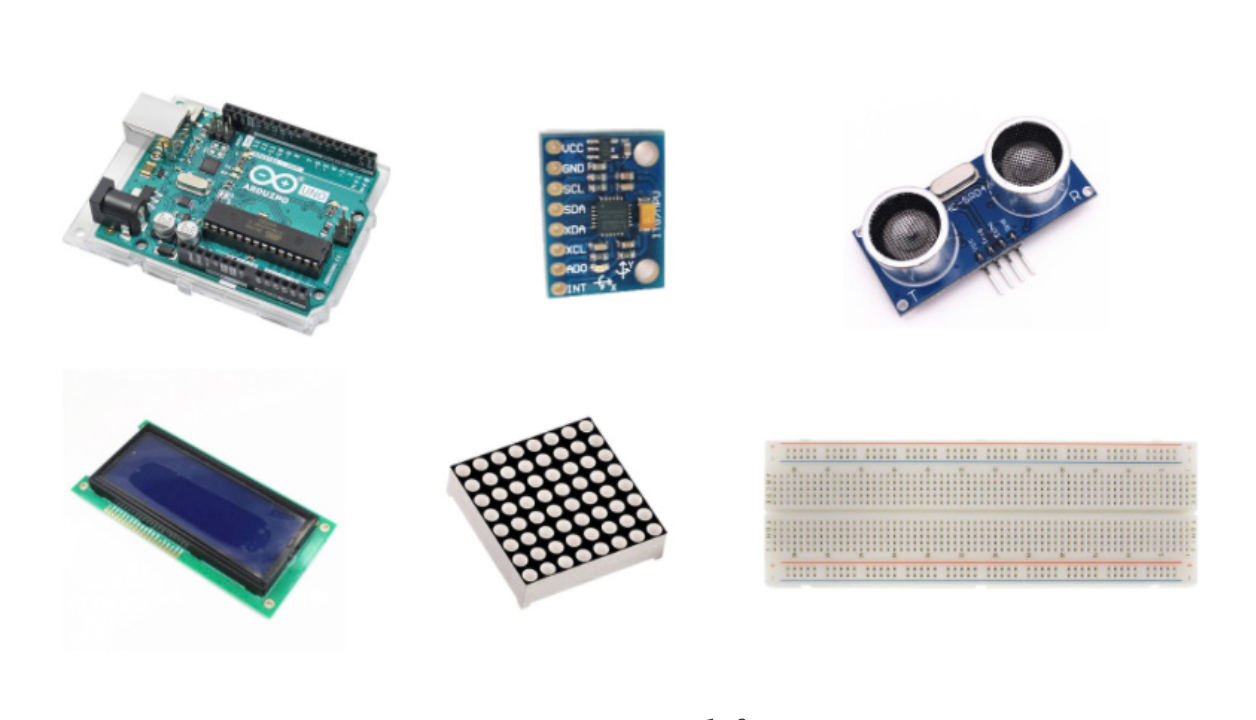
Components of prototype#1-3
Prototype #1
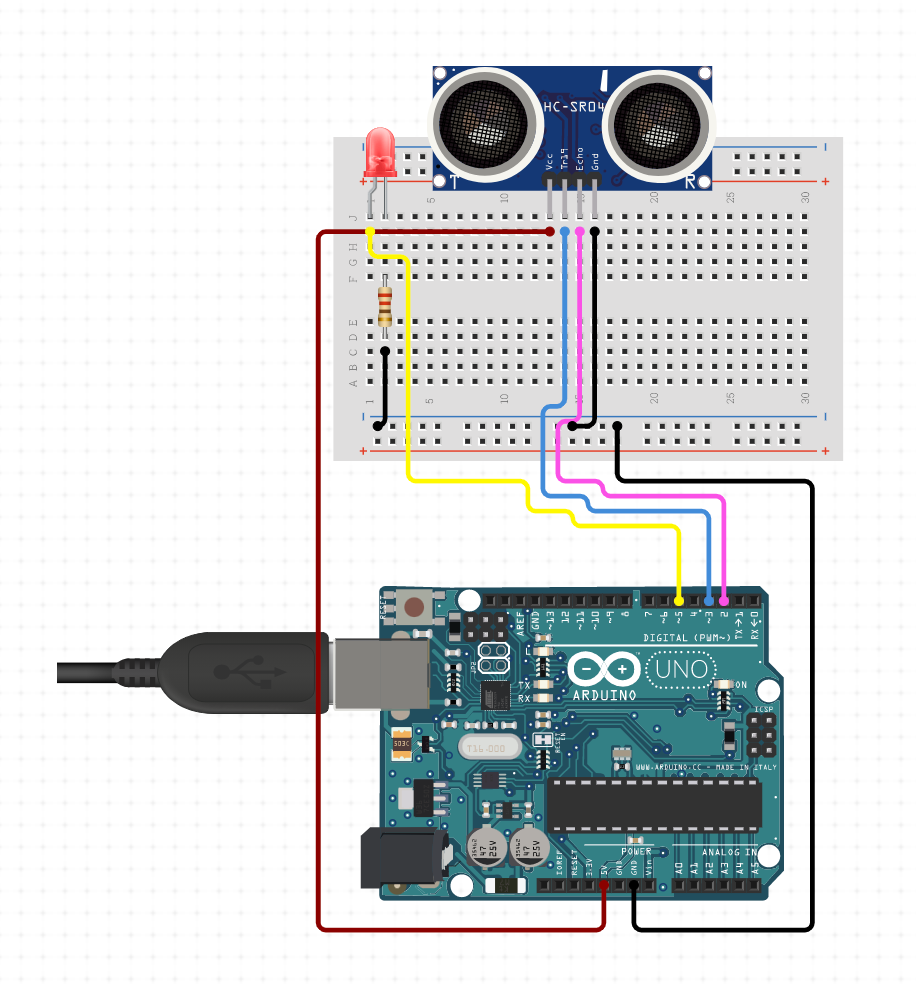
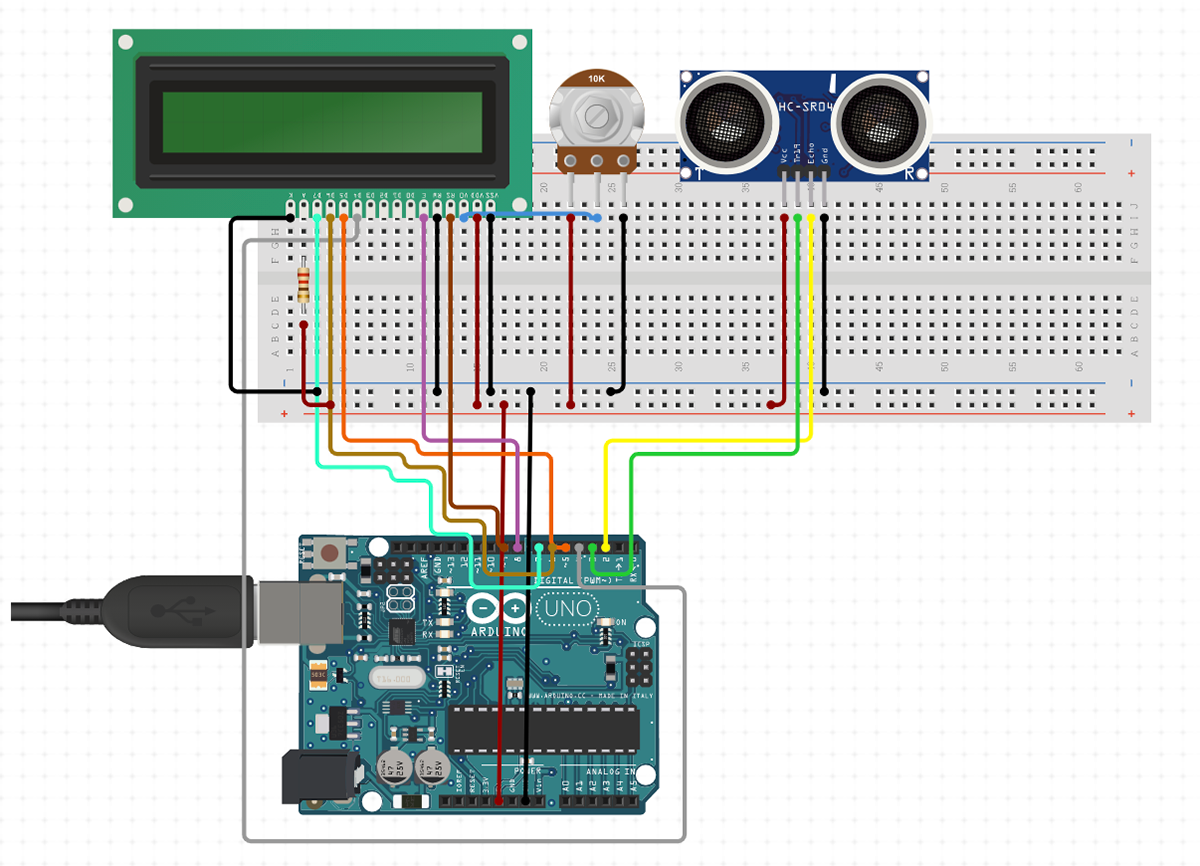
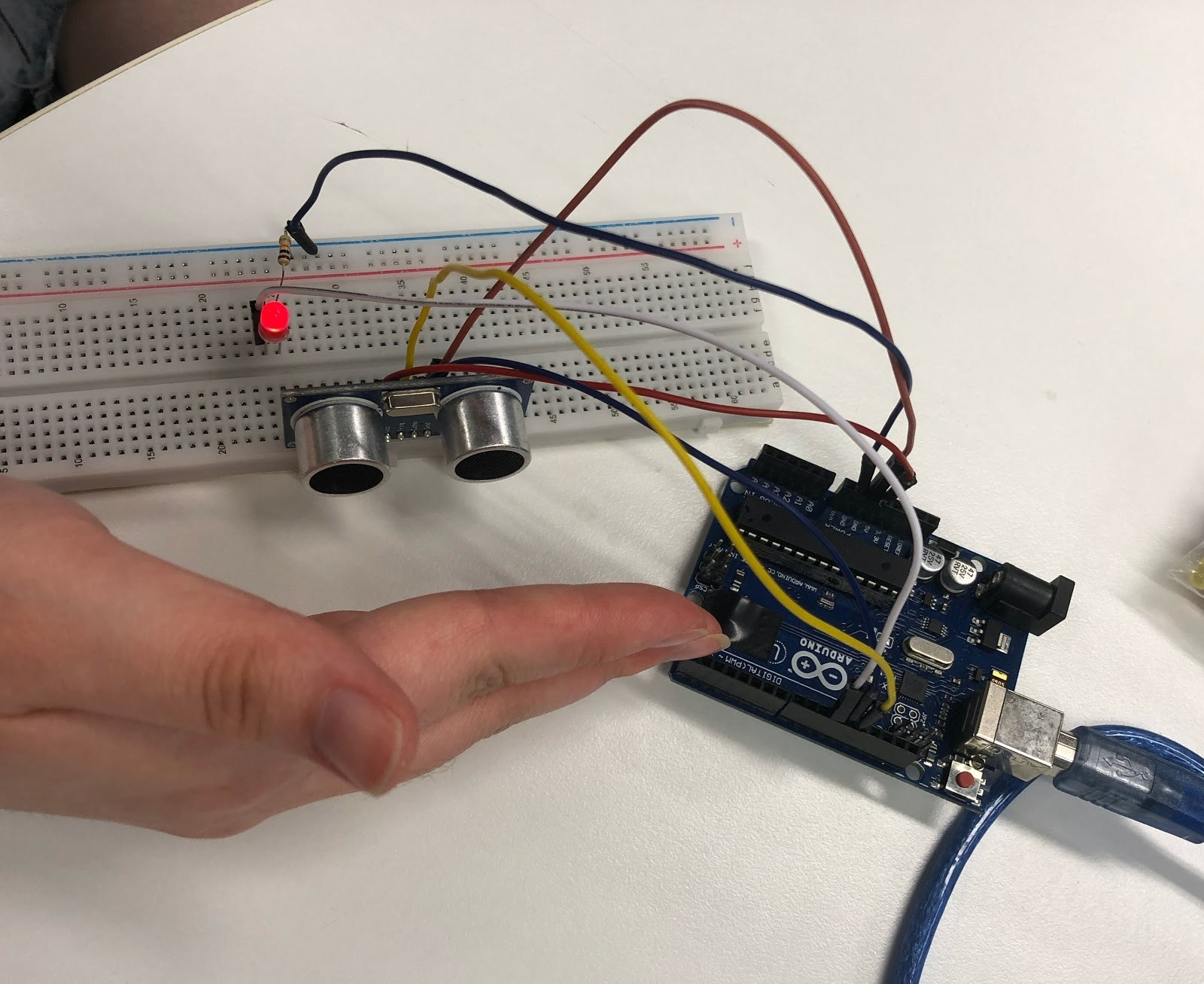
We made prototype#1 for testing the working of the ultrasonic sensor, the distance alarm, and the display of distance on the LCD screen. Circuit diagrams and tests will be shown in the figures and images below.
Through initial testing, we have found that the ultrasonic sensor works but has limitations:
1 ) The maximum distance it can detect is four meters; 2 ) The data will fluctuate if the object intended to be detected is not directly blocked in front of the sensor; 3 ) The fluctuation will also happen when the detected item and the sensor are not on the same level.
1 ) The maximum distance it can detect is four meters; 2 ) The data will fluctuate if the object intended to be detected is not directly blocked in front of the sensor; 3 ) The fluctuation will also happen when the detected item and the sensor are not on the same level.

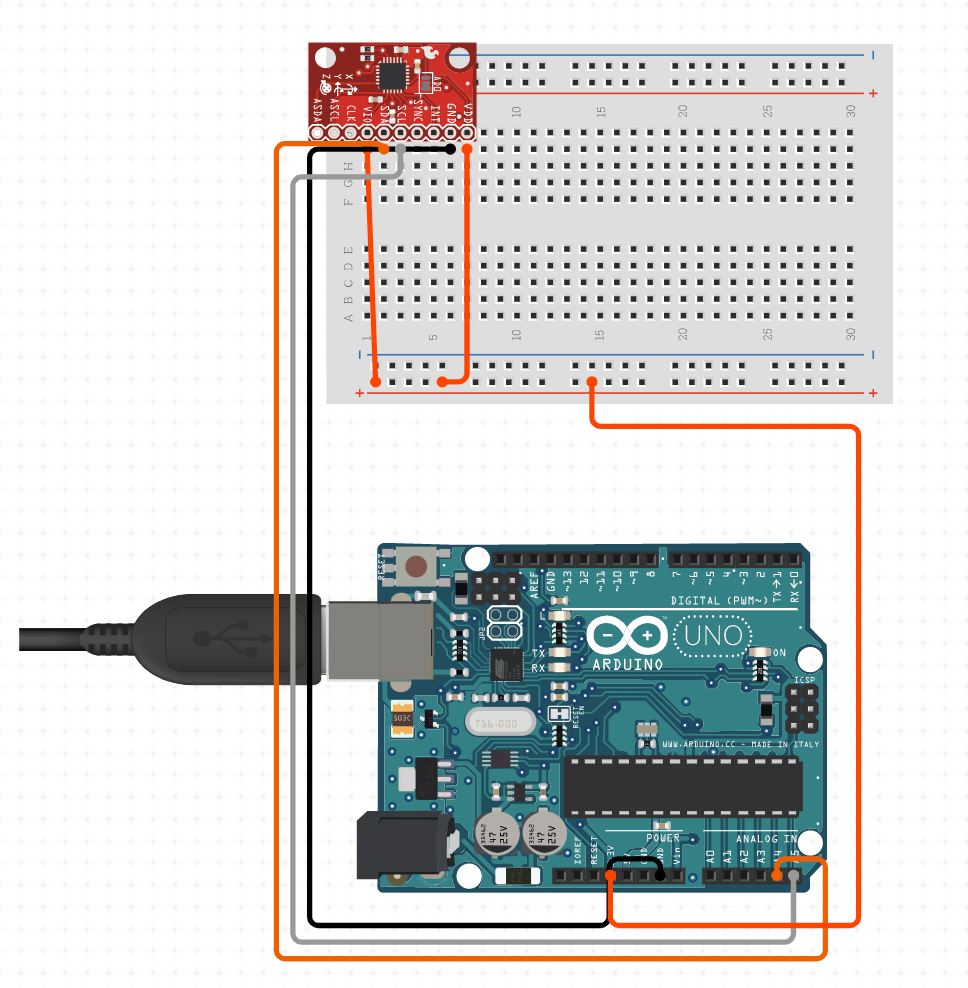
Prototype #2
Prototype #2 mainly focused on the rotation detection of the bike's handlebar, which we assumed could determine the turning direction. The sensor we chose is MPU6050. However, we knew accelerometers are not good for detecting rotation at the horizontal level. We then found that it is workable through the technical exploration of references.
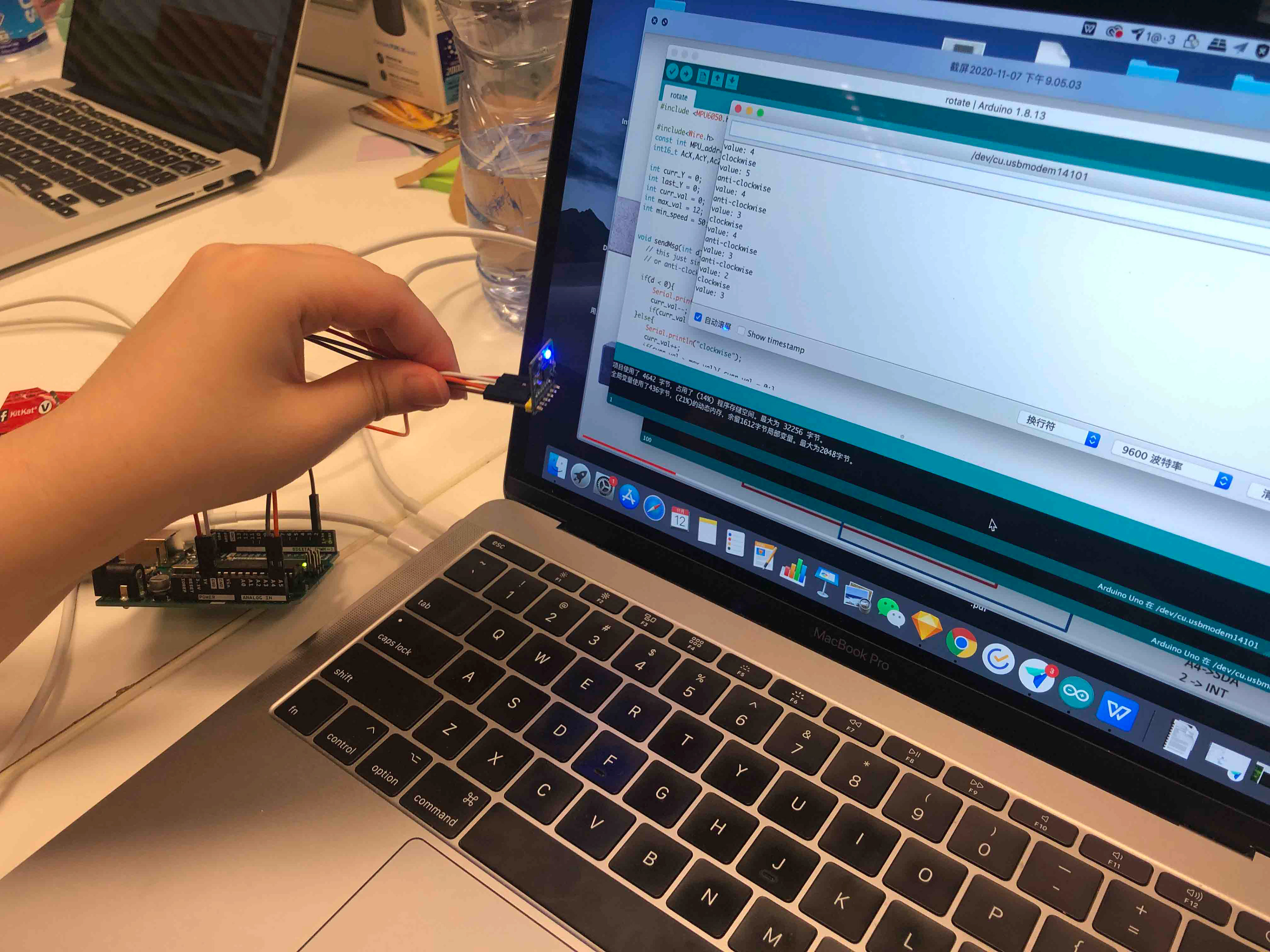
It has an onboard gyro, which only reports angular velocity - i.e. when the direction of movement changes in any axis. This means it only gives meaningful values while it is rotating and does not report its position in space when it is still. We successfully detected the horizontal rotation values and distinguished clockwise and anti-clockwise, which can be used to determine the turning directions: clockwise - turning right, anti-clockwise - turning left.
Besides, we also tested the LED matrix displaying different simple graphics.
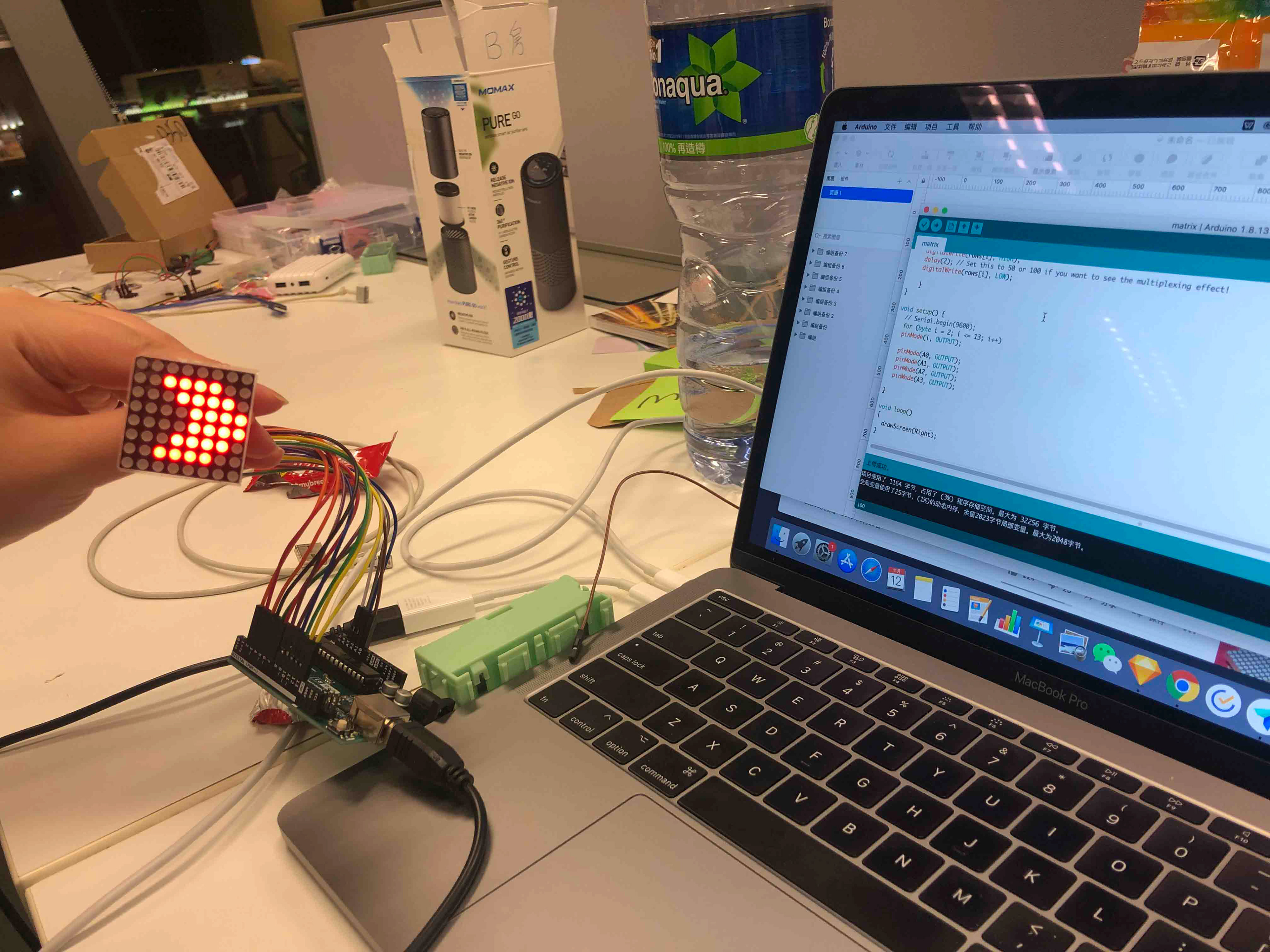
Prototype #3
Before the tests of prototype #3, we ran through the matrix reminder of turning and integrated two modules on the bike, namely directional indicators at the rear and LCD screen distance prompt on the handlebar when people are approaching behind.
We tested prototype#3 on the still bike and during riding. The technical aspects went well. Firstly, the directional indicator matched the movement of the user. Secondly, the distance sensor worked in real riding although the data had been fluctuating.
We gained useful findings from this round of tests:
1 ) The LCD screen is hard to see (too horizontal, inconspicuous display of numbers, small screen area);
2 ) Although the number had been fluctuating, the distance value significantly dropped when the person behind was approaching closer;
3 ) Numerous wires negatively affected the riding experience. Therefore, better wire and component management on the bike is needed.
1 ) The LCD screen is hard to see (too horizontal, inconspicuous display of numbers, small screen area);
2 ) Although the number had been fluctuating, the distance value significantly dropped when the person behind was approaching closer;
3 ) Numerous wires negatively affected the riding experience. Therefore, better wire and component management on the bike is needed.
Prototype #4
To summarize the components' changes, we gave up on the LCD screen according to the user feedback from previous riding tests and added a wifi module ESP8266 to reduce wires and achieve the real-time screen output.
Prototype #4 includes the directional indicator (MPU6050 sensor on the handlebar, the matrix at the rear, and Arduino under the backseat), the distance prompt (screen output on the handlebar, the ultrasonic sensor at the rear, and the ESP8266 under the back- seat). The integration of the prototype and interfaces will be shown as follows.
Updated components

Assembled components on the bike
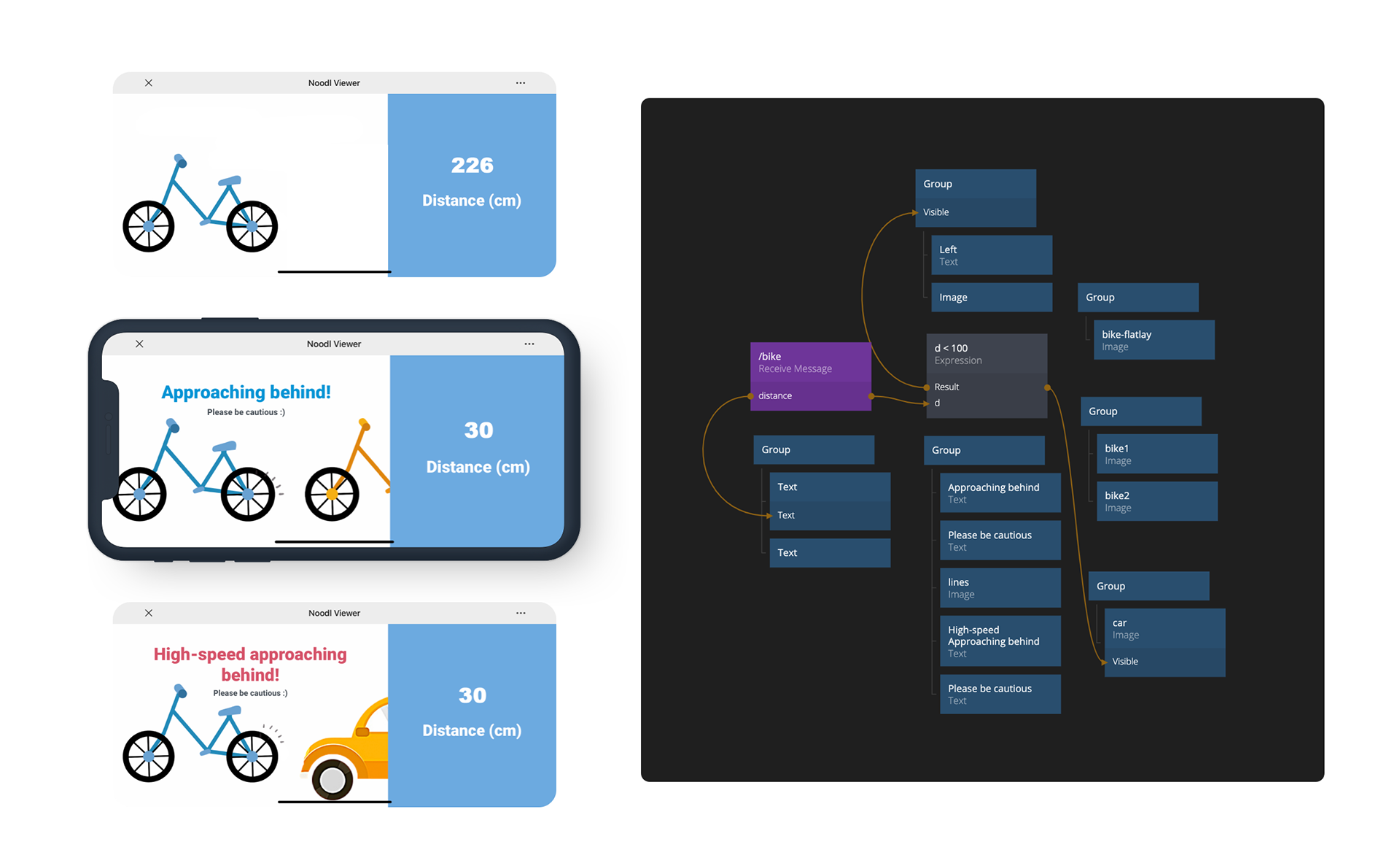
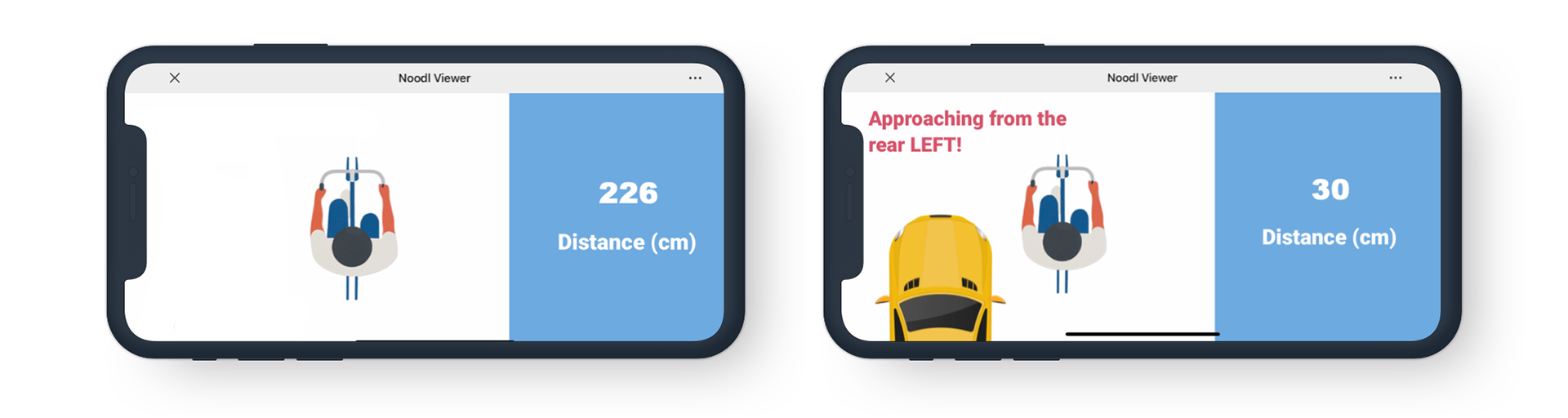
The interfaces of the distance approaching reminder (when nothing, something, and something with high speed approaching behind), achieved by the ultrasonic sensor, MQTT protocol, and Noodl.
User Testing
We conducted two rounds of testing in terms of the final prototype. The first round of testing is based on observing bicyclists' behaviors when skaters were approaching, but they had no indicators. Then we modified our screen output according to findings from initial tests. The second round of testing took place on campus and the corridor. The detailed process and findings will be introduced following initial testing.
Initial Testing and Findings
When it comes to testing the final prototype, we first conducted a round of initial tests. There were two roles: three participants rode bikes without any indicators; one participant went skateboarding behind.
Our goal of this round of testing was to help us define what we want to achieve by testing the final prototype by observing riders' behaviors when having no approaching reminders, seeing if they had any performance of nervousness and riding habits. We got four main insights from initial testing:
1 ) Approaching direction: When riders felt the skater closer, they would look back left and right to check the skater's position and direction. This finding reminds us that approaching direction is also an important attribute that riders want to know, but we neglect it;
2 ) Nervousness: The performance of nervousness affects riding, including shaking the handlebar, hesitating left, or right to ride;
3 ) Target audience: The most experienced rider performed relatively calm during the process, so we may still define our target audience as the junior bike riders as our initial proposal;
4 ) Project support: The skater's feedback kind of supports the necessity of directional indicators.
Based on the first finding, we added interfaces to our prototype to inform users of the approaching direction.
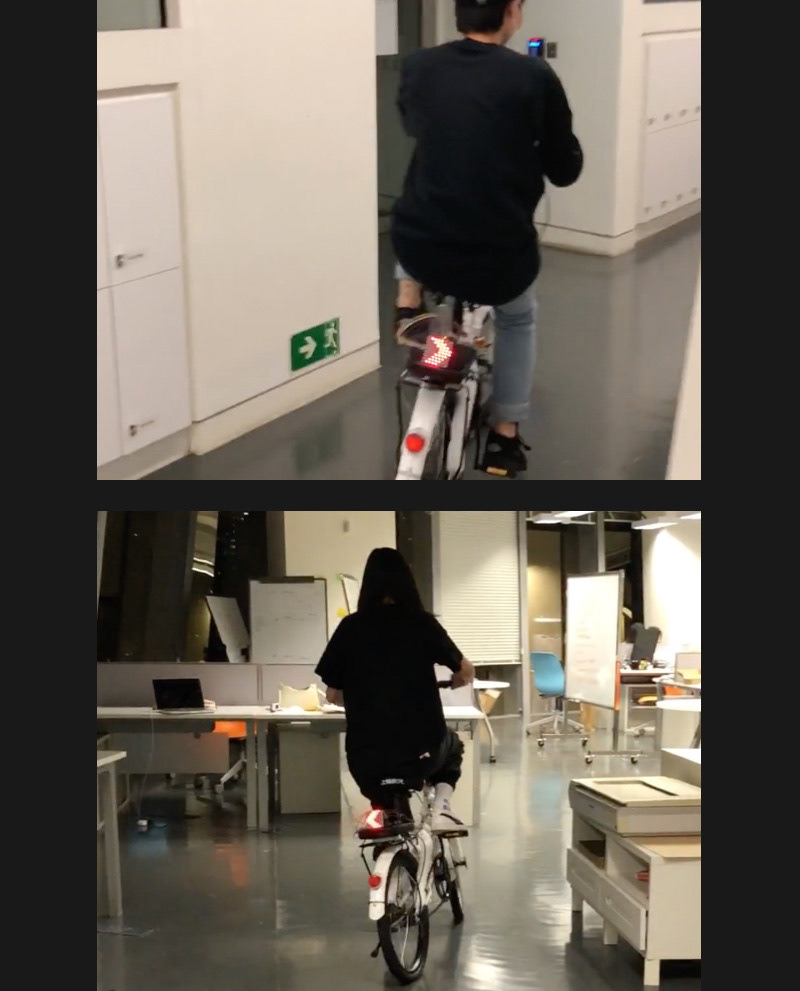
Usability Testing and Findings
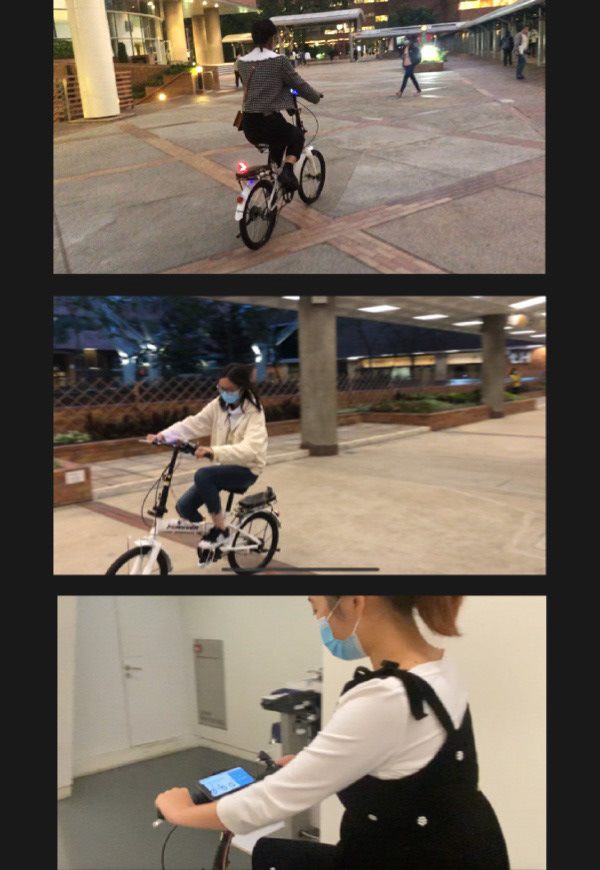
Our final testing includes bike-riding and post-interviews. We prepared the final version of the prototype and three different reminder interfaces. We planned to record the process from three camera spots (front, behind, side) of participants riding on a straight road followed by a turning, through which four events would happen (no objects approaching / approaching / high-speed objects approaching / approaching with specific directions).
We assumed that our final prototype would help participants reduce the sense and performance of nervousness. Moreover, we assumed that the screen output could help participants avoid dangerous incidents like hitting by behaving appropriately, like accelerating appropriately and adjusting to a direction that could avoid approaching objects.
There are five main findings:
1 ) Participants behaved accordingly to different outputs, like accelerating, adjusting to the right when seeing something approaching the rear left;
2 ) Even though the interfaces helped participants react, the screen was too distracted for them to keep looking forward, which adversely affected riding;
3 ) The prototype actually failed to prevent participants from looking back. Some of them wanted to check if the distance is reasonable, some looked back to check which direction the approacher is heading when she received a reminder without a direction prompt. This supports the importance of the approaching direction;
4 ) Participants reduced shaking handlebar and had better clues on the forward direction, but on the other hand, the prompt somehow made them nervous rather than feel relaxed, especially the interface with high-speed approaching;
5 ) Although we designed the prompt because we did not want users to keep looking at the numbers, they still did that. We set the prompt to pop up if the distance is less than one meter, but participants tended to decide to accelerate by the distance numbers rather than the approaching prompt.
Limitations
1 ) Technical limitations:
The limitations of sensors we used affected the testing; for example, the ultrasonic sensor is quite unstable, strongly fluctuating numbers will distract users more; and it is inappropriate for real-road testing as the data will keep changing since it detects everything near it. Moreover, the angle sensor has to be fixed horizontally, and the detection would fail if it tilts.
2 ) Environmental limitations:
As for the environment, although we want to test in the real environment, it would be too dangerous if we test it on the road, and the campus has limited road conditions, so some situations we thought about before did not be tested, such as giving hand signals when turning at crossroads. Furthermore, when participants ride at the campus, the events are limited; what we used as approaching things are just skaters and pedestrians.
3 ) Prototyping limitations:
We did not do adequate testing from people behind to see if the rear directional indicator actually helps. Moreover, during the design process, we went in the wrong direction for a time, entirely focusing on how to learn technical realization, thus neglecting the user side, which is ignoring the core part, and we did not do enough user research and observation during the process, especially at the early stage, which is one of the important reasons why our final prototype did not reach the initial goal. However, this is also what we learned. We regard this project as not only a good technical first attempt but a process of understanding the prototype concept.
Individual Contribution:
Ideation, Technical Explorations and Execution (programming, hardware and sensors, Noodl screen outputs, MQTT communication), User Testing, Walkthrough Video